- Muhammad Affan, OpenVINO-based Optimized Object Detection and Semantic Segmentation for Indoor Mobile Robots
- Abdelrhman Bassiouny, Towards Bigdata in Robotics: Machine Learning Pipeline for Robot NEEMs (Narrative-Enabled Episodic Memories) in an SQL Database
- Hassan Elkholy, Towards improving the perception and autonomous decision making in underwater dynamic docking
- Leonie Buchele, Combining Multibeam and Photogrammetry point clouds
- Maria Saleem, Autoregressive 3D Scene Reconstruction with Structured Data Models
- Ryota Shiomi, Development of 3D Camera Based Relative Navigation for Aerial Screwing Applications
- Vipul Garg, Ferry-SLAM: A System for Environment Perception and Motion Estimation for the Autonomous Ferry
- Ahmed Yehia Zakaria Ibrahim, Trajectory planning problem for detecting radioactive sources using underwater gliders
- Amneh Nasir, Modeling and Simulation of Underwater Textile-Based Soft Robotic Gripper
- Ayesha Aslam, Underwater Optical Communication for Cooperative Autonomous Marine Vehicles
- Berin Đikić, Automotive Lidar Technology for Marine Applications – Determining and Increasing the Accuracy of Simultaneous Localisation and Mapping
- Daniel Oluwatobi Akanji, Cooperative Motion Control of Autonomous Marine Vehicles for Ocean Observation
- Farooq Olanrewaju, Semi-Autonomous Grasp Planning Algorithm for Underwater Applications
- Franziska Stefanie Auer, Detection of Swimmers in Open Water using Shipborne Vision Sensors
- Lara Gemmrich, Estimating Sea Ice Thickness in the Arctic using ROV-based Underwater Hyperspectral Imaging
- Luis Alejandro Grajeda Blandon, Artificial Intelligence Framework for Human-Robot Cooperative Operation through Hand Gesture Recognition
- Maximilian J. Vieweg, Segmentation of Maritime Vehicles from Video Sequences
- Md Sazidur Rahman, Enhancing Underwater Object Detection, Multi-Label Classification, and Out-of-Distribution Detection with Advanced Deep Learning Techniques and Augmentation Methods
- Robert Nicholas Norfleet, Autonomous Labelling and Supervised Learning of a Deep Neural Network for Sea Ice Segmentation
- Victor Luis Gomes Marchesini Fonseca, The application of learning techniques to improve the control of surface vehicles
- Yosef Shmuel Guevara Salamanca, Towards Real-Time Hydrodynamics and Fluid Simulation for Marine Robotics
- Sakib Ahmed, Maritime Small Object Detection from UAVs for Autonomous SAR Missions using Deep Learning-based Approaches
- Md Abulkalam Azad, Multi-label Video Classification for Underwater Ship Inspection
- Shubham Garg, Design and Validation of a Course Controller for a Wave Powered Vehicle Using NMPC
- Noémie Hirtzig, Multi-Sensors Relocation
- Abdelrahman Ibrahim, Risk Aware Control of Underwater Snake Robots in Confined Environments
- Azamat Kaibaldiyev, Self-supervised multimodal representations for marine robotics
- Md Ashiqul Alam Khan, Underwater Machine Vision for Long Term Operation of Robotic Platforms
- Usame Mujahid, Evaluation of feature extraction techniques on aquaculture place recognition problem
- Luis Fernando Sanchez Martin, Online Digital Twin and a Decision Support for Safe Maneuvering of R/V Gunnerus
- Abdul-Kazeem Shamba, Generating Realistic Underwater Images Using Contrastive Learning
- Ahmed Abdelgayed, Adaptive Mission Planning for Water Column Investigations
- Aduragbemi Adetunji, State Estimation and Improved User Experience Through Automatic Control for an Underwater Drone
- Ramy Antar Ahmed Alham, Enhancing the Navigation and Fault Detection in Small Remotely Operated Vehicles (ROVs)
- Francisco Amor Roldan, Data Driven modelling of Sea Ice Drift
- Nimra Jabeen, Precise Semantic Segmentation from Stereo-Images for Autonomous Navigation
- Oluwatobi Ojekanmi, High-Fidelity 3D Reconstruction of Underwater Scenes Using Neural Radiance Fields (NeRFs)
- Md Raqibur Rahman, Self Supervised Scale Consistent Depth and Ego-motion Learning From Monocular Video For Underwater Robots
- Abdelhaleem Saad, Adaptive Control for Underactuated USVs: Towards Cleaner Waters
- İsmetcan Saraç, Analytical and Numerical Investigations of Squid‑Inspired Propulsion System
- Andreas Sitorus, Discrete Ballast Configuration Estimation for a Straightforward Underwater Vehicle Deployment
Poster session at the annual MIR Symposium is an opportunity for 1st year students to present a poster about their tentative master thesis subject and meet with potential host companies or supervisors. It is also the occasion for 2nd year students to present the work they have done so far on their master’s thesis. Below is a selection of posters.
- Bora Aydin, Deep Learning Based Detection and Classification of Marine Mammals
- Abubakar Aliyu Badawi, Onboard Mission Management and Machine Learning Integration for Small Resident Underwater Vehicles
- Susanna Munari, Sensor Fusion for Robust Underwater Navigation: A Monocular Camera-based SLAM System with ORB-SLAM3
- Tayyab Tahir, Enhancing Vessel Fuel Efficiency through a Machine Learning-Based Energy Management System
- Md Ether Deowan, Object Detection and Grasp Planning For Autonomous Intervention
- Shubh Singhal, Autnomous Detection and Repair of Fishnet Holes Using Vision-based Grasping Algorithm
- Marina Gabarda López, Takeoff and landing of an UAV on a surface vehicle for sustained presence at sea
- Shahriar Hassan, Cooperative Advanced Motion Control of Aerial and Marine Vehicles for Multipurpose Application
- Camilla James, An Intelligent AUV for Marine Animal Tracking and Passive Acoustic Monitoring
- Celil Yilmaz, LLM-Nav: Enhanced Navigation with Large Language Models for Marine Vessels
- David Eskoundos, INSPIRATION: Enhancing Underwater Images Using Reinforcement Learning
- Akshat Sinha, Artificial Intelligence Framework to Accuratelly Perform Small Object Detection on the Water Surface
- Mahmoud Hassan, Enhancing Performance with Graph Neural Networks for Multi-Cooperative AUVs Flow Control and Obstacle Avoidance
- Philopateer Akhnookh, Optimizing Autonomous Operations for underwater and Surface vehicles
- Abhimanyu Bhowmik, Reconfigurable Robotics for Subsea Operations
- Maxime Audrain, Enhanced remote control of autonomous ship through Meta Quest VR
- Tihan Mahmud Hossain, Autonomous UAV-Glider Launch and Recovery System
- Rameen Sheikh, Underwater Intervention for Pipeline Inspection
- Sergei Chashnikov, Cooperative underwater glider operations supported by ASVs
- Madhushree Sannigrahi, Autonomous Localization for Bio-Inspired Resident AUVs using visual cues
- Md Shamin Yeasher Yousha, Automated Semantic Labeling of Sea Ice Images Using Custom Sensor Systems
- Abdelrahman Abdelhamed, Cooperative Tracking of Multiple Targets Underwater by Multiple Autonomous Underwater Vehicles (AUVs) Multi-Agent Reinforcement Learning
- Ainhoa Idiondo Molina, Use of AUV’s For Detection and Mapping of Lost Equipment and Marine Litter
- Yassine Ait Aouicha, Autonomous Underwater Maintenance and Inspection Using Object Detection and Grasp Planning
- Krittapat Onthuam, Object Grasping Point Estimation For Underwater Manipulator
- Azad Md Abulkalam, Out of Distribution Detection for Safe Underwater Infrastructures using Computer Vision
- Felipe Eduardo Alaniz Mendez, Dynamic Positioning Of A Rov Using Reinforcement Learning
- Luis Alejandro Grajeda Blandón, Artificial Intelligence Framework to Accurately Perform Underwater Human Robot Interaction Through Hand Gestures
- 2019 MIR Erasmus Mundus kick-off event – cf. EMJMD MIR Director Ricard Marxer’s interview at the kick-off event
- 2022 MIR Robotic Championship “Guerledus Challenge”
- 2022 Submeeting, France
- 2022 MIR Symposium in UTLN, France
- 2023 MIR Symposium and robotic championship in UJI, Spain
- 2024 Submeeting, France
- 2024 MIR Symposium and robotic championship in IST-UL, Portugal
- 2025 MIR Symposium in NTNU, Norway – upcoming, 3, 4 and 5 June 2025
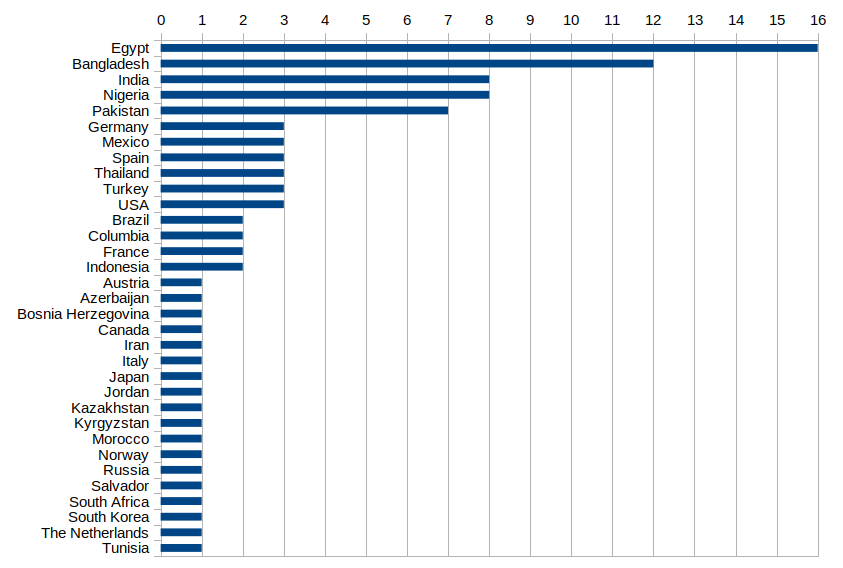
Nationalities
The 95 students from the 4 editions of the MIR Erasmus Mundus Master have 33 different nationalities which are illustrated and detailed on the world map and the chart below.
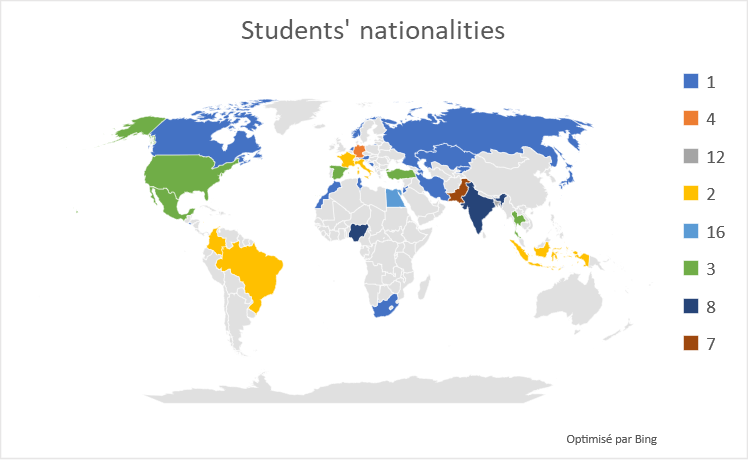
Number of students per nationality (4 editions)
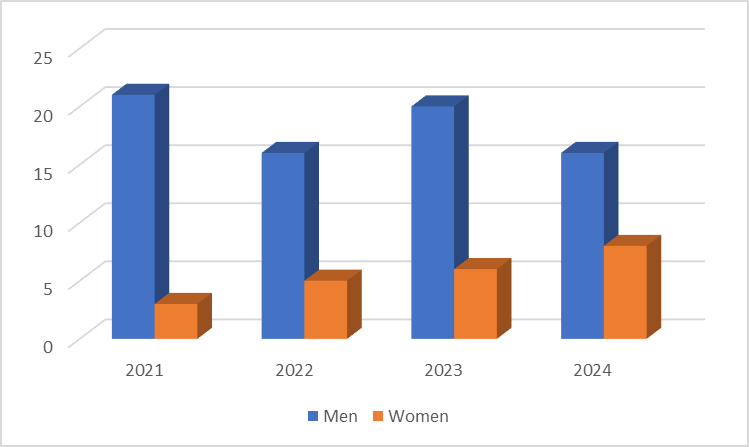
Gender representation
Over the course of the 4 editions of the EMJMD MIR, the number of female students has risen steadily. Indeed, while female students represented 12.5% of the total number of students in the first edition, they represent 33.3% in the 4th edition, showing the increased interest of female students in the programme.
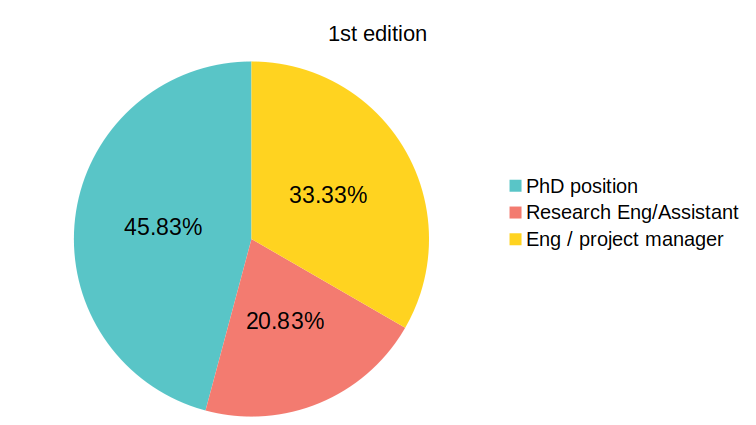
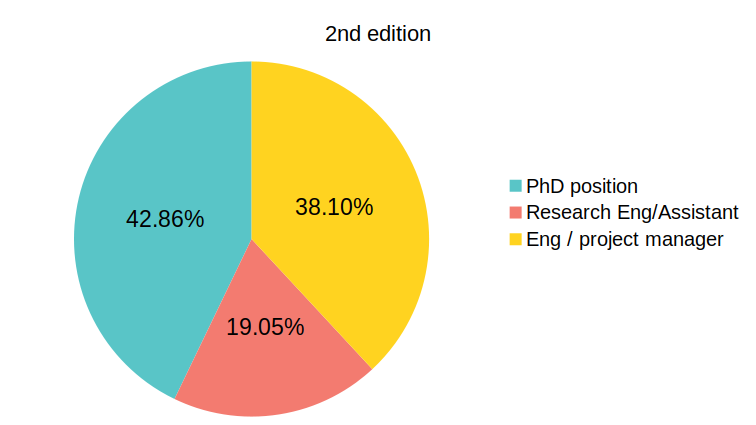
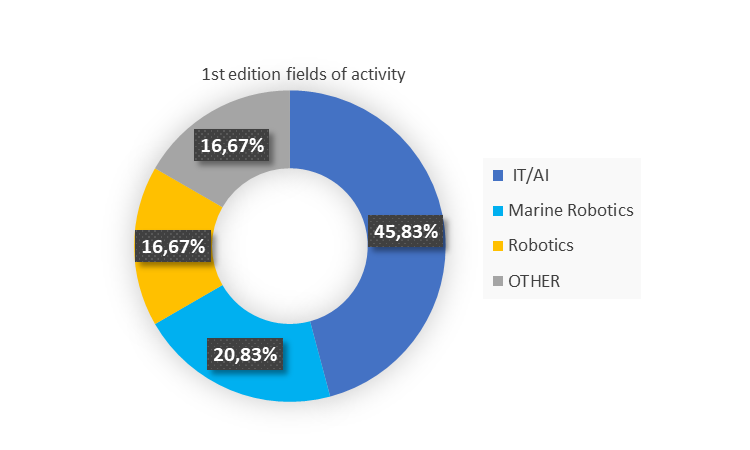
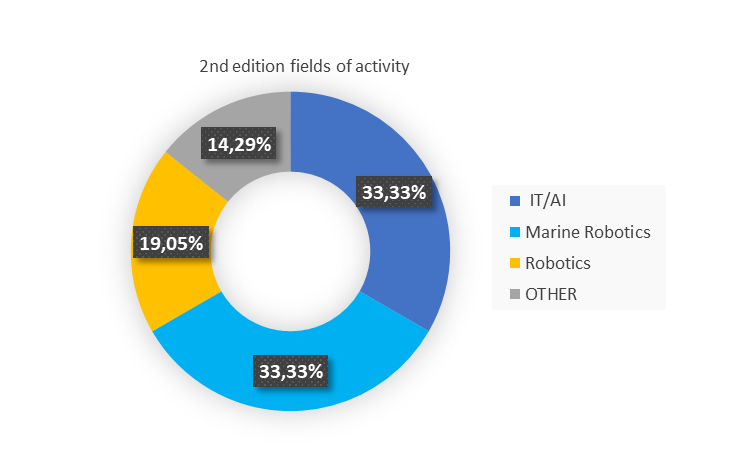
In the case of the first and second editions, 100% of alumni secured a position within 6 months following graduation. Below are detailed the types of positions and fields of activity in which our alumni are working.
- SPH-Hydro project, TransNational Access no 2/H2020, Cosmer Lab underwater robotics experimentations at CIRS (Centre d’Investigació en Robòtica Submarina), Girona, Spain, March 2020.
- UV-Hydro-Cable project, TransNational Access no 3/H2020, Cosmer Lab underwater robotics experimentations at CIRS (Centre d’Investigació en Robòtica Submarina), Girona, Spain, June 2021.
- Interreg Marittimo italeo-french FABIS project (2025-2028), Survey of scientific and professional diving practices and implementation of technical and technological innovations to improve divers’ missions and safety. University of Toulon. Coordinator: University of Genoa (UNIGE – Università degli Studi di Genova), Italy.
Students have published scientific articles in prestigious international conferences and professors have published articles on the MIR Master Mundus in international conferences, enhancing the visibility of the Master’s programme.
MIR student research work highlights
- Award for master thesis workAbdelrahman Ibrahim‘s master thesis title : Risk Aware Control of Underwater Snake Robots in Confined EnvironmentsMIR student receives “Best student presentation award” for master thesis work at UTC 2023.
- Conference paperAuthors: Md Ether Deowan, Md Samin Yeasher Yousha, Tihan Mahmud Hossain, Shahriar Hassan, Ricard Marxer, “Optimizing Underwater Robot Navigation: A Study of DRL Algorithms and Multi-Modal Sensor Fusion”, accepted for presentation at the 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, USA, May 19–23, 2025.
Conference publications on MIR master training
- Marine and Maritime Intelligent Robotics (MIR)Ricard Marxer, Vincent Hugel, Kalliopi Pediaditi Prud’Homme, Pedro Batista, Jose Vicente Marti Aviles, Antonio Pascoal, Pedro Sanz, Ingrid Schjolberg, Conference: OCEANS 2021 – San Diego, CA, USA. doi: 10.23919/OCEANS44145.2021.9706122.
- 1st Year of running MIR at UJIPedro Sanz, Raúl Marín, Salvador López-Barajas, Alejandro Solis, Ricard Marxer, Vincent Hugel, Conference: OCEANS 2023 – Limerick, Ireland, DOI:10.1109/OCEANSLimerick52467.2023.10244270.
- Travaux Pratiques de modélisation et commande de robots sous-marins (in French),
Vincent Creuze, Vincent Hugel et Sabine Seillier
J3eA, Volume 23, 2024.
- “Un nouveau master international d’excellence en robotique marine et maritime à l’université de Toulon”, Var-Matin. November 5, 2019
- “La Garde : Un master à la pointe de la robotique marine”, Var Azur TV. November 8, 2019
- “L’Université de Toulon propose un nouveau master en robotique marine et maritime intelligente”, Le Journal des Entreprises. November 8, 2019
- “Maîtriser les robots à l’Université de Toulon”, Le Var Information. November 8, 2019
- “L’instantané de la semaine”, Var-Matin. November 11, 2019
- “L’Université de Toulon propose un nouveau master en robotique marine et maritime intelligente”, Le Journal des Entreprises. November 12, 2019
- “L’université au sommet de la vague technologique”, Var-Matin. November 13, 2019, frontpage and p.11.
- “L’Université de Toulon lance un master Marine and Maritime Intelligent Robotics (MIR)”, Studyrama. November 19, 2019, p.46-47
- “Un master international en robotique marine à Toulon en 2020”, Le Marin. November 20, 2019, p.42
- “Une formation high-tech pour les nouveaux métiers de la mer”, GOMET’. December 16, 2019
- “LA GARDE : VOEUX 2020 – Université de Toulon – Xavier LEROUX, président : « L’Université participe activement à la politique portée par la Métropole »”, Presse Agence. January 9, 2020
- “Este máster internacional combina robótica e inteligencia artificial”, El Periódico Mediterráneo. July 20, 2021
- “L’élite de la robotique sous-marine française se donne rendez-vous à Saint-Raphaël”, Var-Matin. April 7, 2022
- “TOULON : Université de Toulon – Symposium MIR en robotique marine”, Presse Agence. June 9, 2022
- “L’Université de Toulon accueille un symposium en robotique marine”, Le Var Information. June 17, 2022, p.6
- “Université de Toulon : le ministre djiboutien de l’Enseignement supérieur en visite”, Le Var Information. December 23, 2022, p.6
- “Este máster aborda técnicas pioneras en robótica submarina”, El Periódico Mediterráneo. January 31, 2023
- “Université de Toulon : « Une politique de différenciation sur l’axe maritime non exclusive » (X.Leroux)”, News Tank Éducation & Recherche. March 24, 2023
- “Université de Toulon Master MIR (Science en robotique marine et maritime intelligente)”, Planète Robots. December 9, 2023, special issue no. 4, Guide des écoles de robotique 2024, p.80
- CARVOYEUR, Gilles.”HYERES : Une convention entre le Parc national de Port-Cros…”, Presse Agence. March 8, 2025